
基於非奇異終端滑動擾動觀測器的腦膜切開術設備的有限時間跟跟器設計
- 電子工程系|莫薩利 老師
- 2022年2月26日
- 讀畢需時 1 分鐘
已更新:2022年3月27日

主持人|莫薩利
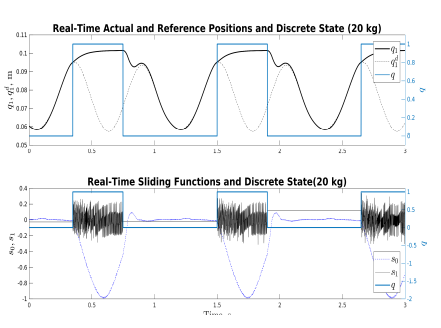
該研究項目提出了一種基於擾動觀測器的非奇異終端滑模控制方法,用於對切開血管的手術設備進行跟跟和精確的運動控制。
發展歷程與步驟
帶有滲出液的中耳炎是細菌液在中耳腔的積聚,可能會造成災難性後果,例如聽力下降和感染。 通氣管塗藥器是外科醫生用來清除黏在中耳的液體的有用的外科手術設備。 所提出的控制方法可以在存在干擾,非線性和不確定性的情況下實現對所需運動軌跡的精確跟跟。 在數學上證明了開顱手術設備的跟跟控制,仿真結果證實了該方法的適用性和有效性。
成果與衍生價值
這項研究的主要貢獻如下: -擾動觀測器的設計,用於估計壓電超聲致動器的擾動,不確定性和非模型動力學,包括磁滯。 -干擾觀測器,可確保干擾估計誤差收斂到原點。 -快速的TSMC和非奇異的TSMC設計,可以精確地控制PUA,以便跟跟運動軌跡。 -學生和研究人員將了解更多關於該機器人系統的開顱手術設備以及控制器和觀察器設計的知識。
未來方向
學生和研究人員將了解更多關於該機器人系統的開顱手術設備以及控制器和觀察器設計的知識。已改進開顱手術設備在實際醫療上可行性。

















留言